Reactive Mobility
Sensor-Based Robots
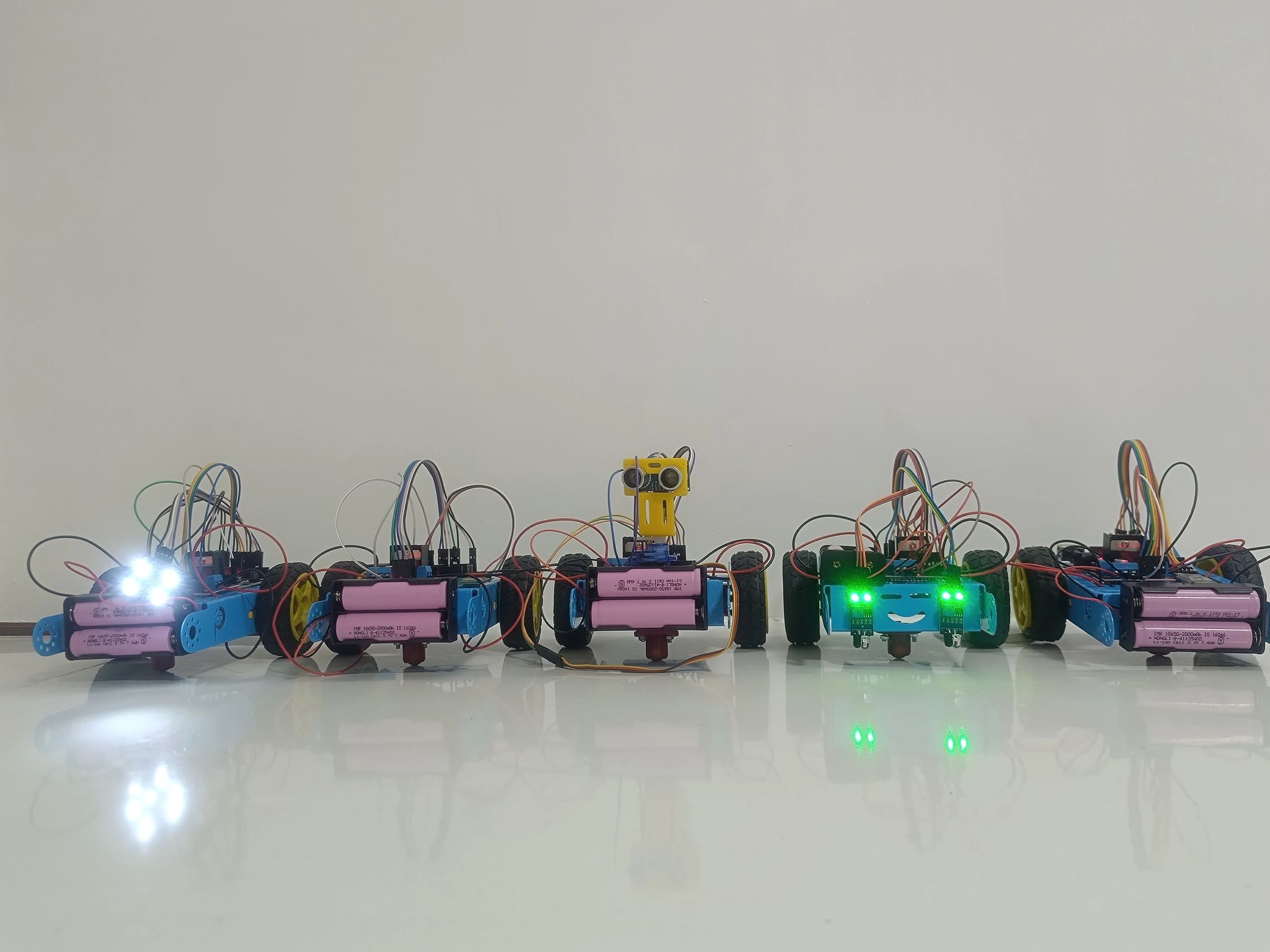
Line follower, obstacle avoidance, wall following, light and color tracking robots using ROS 2 nodes.
Autonomous Mobile Robot platforms built on ROS 2, designed for real-world robotics execution, not demos.
This AMR platform is a single ROS 2 software architecture deployed across multiple mobile robot configurations-not separate robot builds.
Line followers, gesture-controlled robots, autonomous units, and GPS-based systems all run the same node graph and communication model. Sensors and behaviors vary. Core logic does not.
Built and validated during internship execution, this platform shows how scalable autonomy works in practice: architecture first, features later.
Line follower, obstacle avoidance, wall following, light and color tracking robots using ROS 2 nodes.

Gesture, voice, Bluetooth, RF and Wi-Fi controlled robots implemented using ROS 2 messaging.

GPS-guided robots, human-following robots, and autonomous navigation concepts.

Fire-fighting robots, smart dustbin robots, never-fall and safety-driven mobile robots.
This platform is designed for environments where execution, not demonstrations, defines learning and capability.
Interns who need to build, integrate, debug, and validate real mobile robots using ROS 2-not simulations alone.
Students transitioning from component-level projects to system-level robotics architecture.
Institutions looking to standardize robotics experiments, projects, and evaluations on a single scalable stack.
Centers focused on rapid upskilling, applied autonomy, and industry-aligned robotics execution.